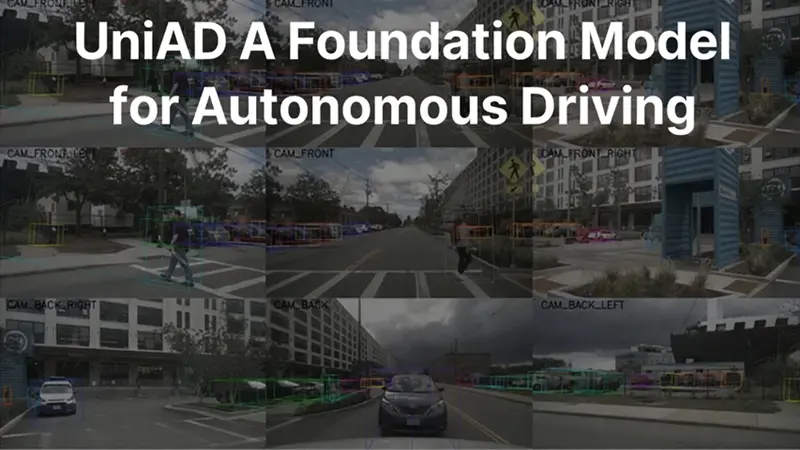
MODEL-ZOO UniAD 自动驾驶基础模型 UniAD是端到端自动驾驶的基础模型。它于2023年4月由OpenDriveLab、武汉大学和商汤科技研究院联合提出,并荣获CVPR 2023最佳论文奖。
MODEL-ZOO NVIDIA LocateAnything-3B LocateAnything-3B代表了视觉定位领域的重大进步——这一领域专注于帮助AI不仅理解图像中有什么,还能精确知道每个物体在哪里。
MODEL-ZOO 本地运行Fable 5增强版Gemma 4 了解如何使用预构建的llama.cpp二进制文件在RTX 5070 Ti上本地运行Fable 5增强版Gemma 4,测试MTP推测解码,连接Pi实现私有AI编码智能体工作流,并排查常见设置问题。
MODEL-ZOO Ornith-1.0-35B:超快的MoE模型 DeepReinforce的Ornith-1.0–35B MoE模型以极低的计算量提供了接近27B密集模型的质量。我在llama.cpp上测试了它——无需任何升级。
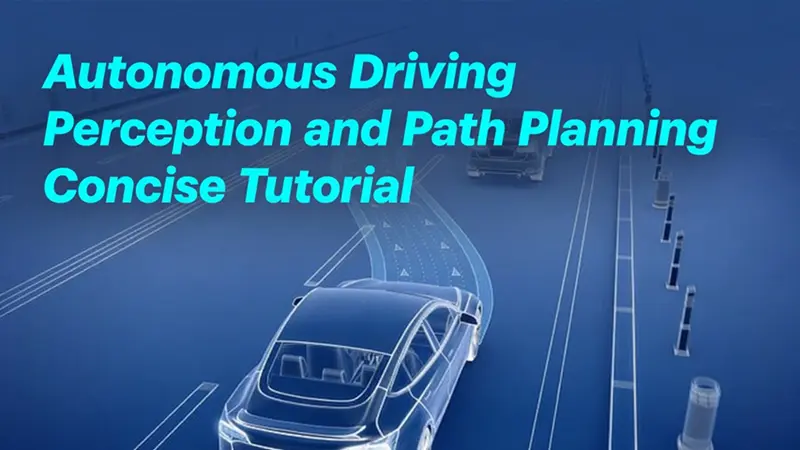
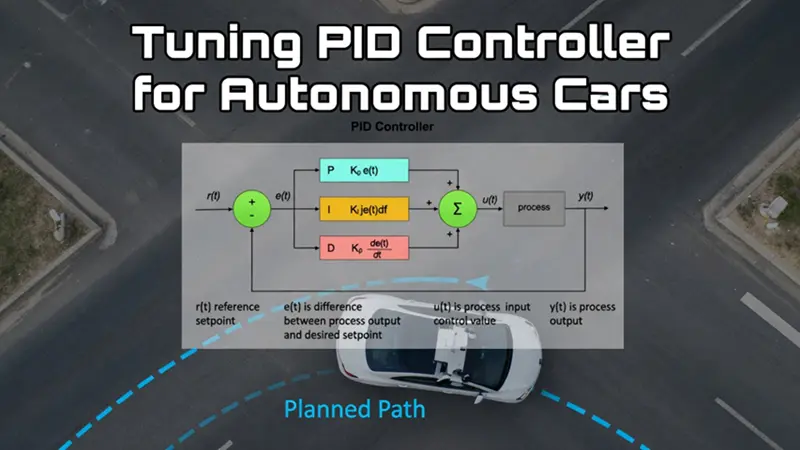
PHYSICAL AI 自动驾驶运动规划解读 运动规划问题可能看起来像是一组元素,如"贝塞尔曲线拟合"或"有限状态机",甚至是"A* 和 Dijkstra!!!",但实际上它比这更复杂。有两个主要的子主题需要处理:高级运动规划: 如何规划从 A 到 B 的路线。(战略家)低级运动规划: 如何超车、生成轨迹等——即战术家。
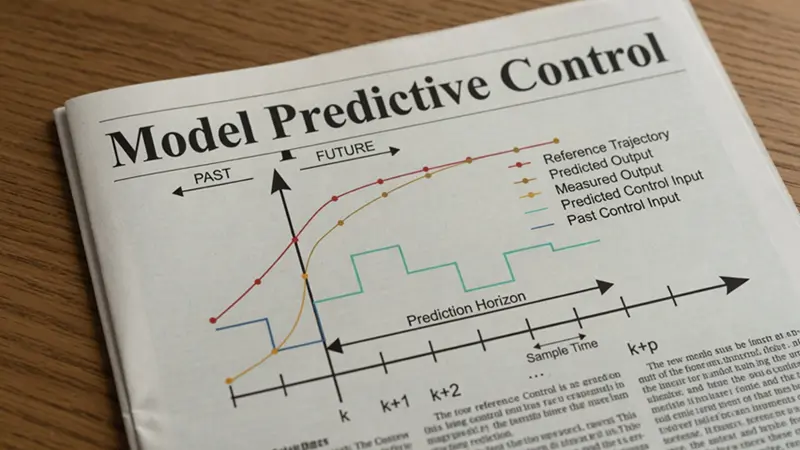
PHYSICAL AI 模型预测控制(MPC)简明教程 MPC是一个智能算法,能够展望生产线或系统的未来,基于预测调整其路线以优化性能。与基本的控制方法不同,MPC 可以提前思考,使其非常适合复杂的、相互关联的系统。
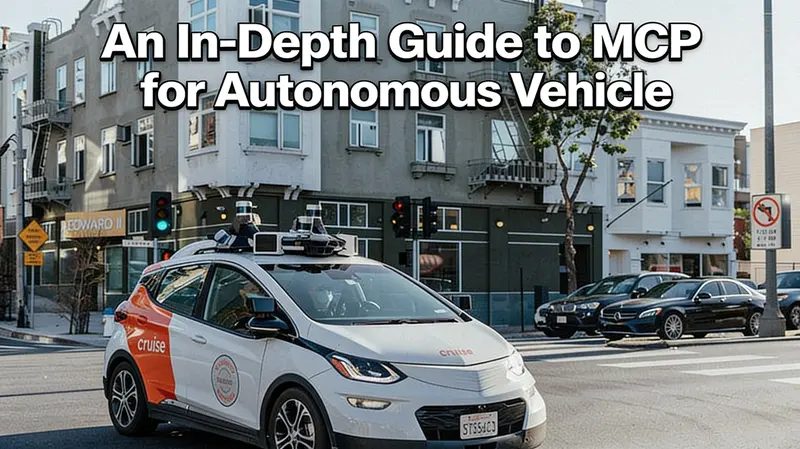
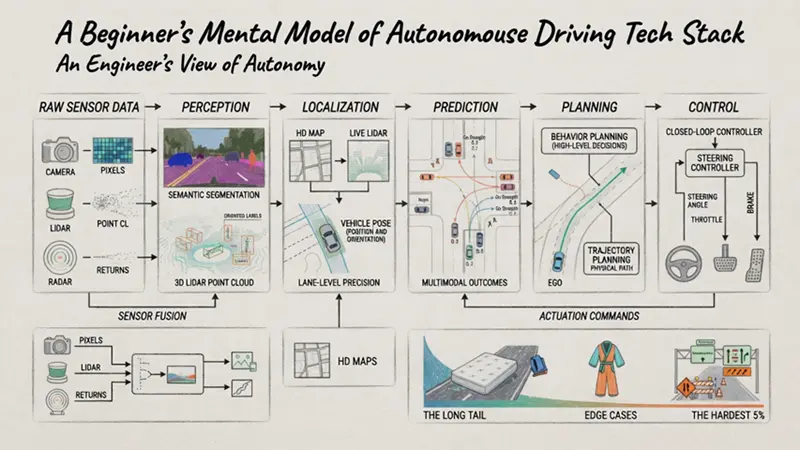
PHYSICAL AI 自动驾驶技术栈:初学者心智模型 本文将帮你建立自动驾驶的心智模型。我会依次讲解自动驾驶的分级、经典 AV 流水线、传感器及其融合原因,以及主要的功能模块(感知、定位、预测、规划、控制)。